
목록논문리뷰 (2)
정리노트
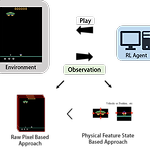 [논문리뷰] Deep Q Network (DQN)
[논문리뷰] Deep Q Network (DQN)
https://arxiv.org/abs/1312.5602 Playing Atari with Deep Reinforcement Learning We present the first deep learning model to successfully learn control policies directly from high-dimensional sensory input using reinforcement learning. The model is a convolutional neural network, trained with a variant of Q-learning, whose input is raw arxiv.org https://www.nature.com/articles/nature14236/?source=..
 [논문리뷰] Human-in-the-loop optimization of hip assistance witha soft exosuit during walking
[논문리뷰] Human-in-the-loop optimization of hip assistance witha soft exosuit during walking
https://www.researchgate.net/publication/323483725_Human-in-the-loop_optimization_of_hip_assistance_with_a_soft_exosuit_during_walking ◆ Introduction 그동안 외골격 로봇에대한 수많은 연구가 있어왔지만, 적용에 어려움을 겪는 가장 큰 부분중 하나는 바로 'Personalization'에 대한 부분이다. 사람의 신체와 움직임의 특성은 개개인마다 천차만별이기 때문에, 특정 목적을 수행하는 제어가 이루어지더라도, 한가지의 고정된 Control Strategy로는 모든 사람들에게 Optimal한 제어를 제공할 수는 없다는 것이 여러 논문 결과를 통해 밝혀졌다. 가령, 사람이 걷는데 힘을 보조하는 ..